Roboti “kallamar” noton me kafshët detare
Shkencëtarët në Universitetin e Southampton dhe Universitetin e Edinburgut kanë zhvilluar një robot fleksibël nënujor që mund të çojë veten përmes ujit në të njëjtin stil si notari më efikas i natyrës – kandil deti Aurelia aurita.
Gjetjet, të botuara në Science Robotics, demonstrojnë se roboti i ri nënujor mund të notojë aq shpejt dhe me efikasitet si kallamarët dhe kandilët e detit që frymëzuan modelin e tij, duke zhbllokuar potencialisht mundësi të reja për eksplorim nënujor me modelin e tij të lehtë dhe pamjen e jashtme të butë.
Bashkë-autori Dr. Francesco Giorgio-Serchi, Ligjërues dhe Anëtar i Kancelarit, në Shkollën e Inxhinierisë, Universiteti i Edinburgut, tha: “Magjepsja për organizmat si kallamarët, kandilët e detit dhe oktapodët është rritur jashtëzakonisht sepse ato janë mjaft unike në atë mungesa e tyre e strukturës mbështetëse skeletore nuk i ndalon ata nga bëmat e jashtëzakonshme të notit. “
“Kostoja e transportit” përdoret për të krahasuar efikasitetin e specieve në të gjithë biologjinë, dhe me këtë masë kandil deti është kafsha më efikase në natyrë, duke mundur me lehtësi kafshët vrapuese dhe fluturuese dhe peshqit kockor.
Roboti i ri u zhvillua në Universitetin e Southampton dhe është zhytësi i parë që demonstron përfitimet e përdorimit të rezonancës për shtytjen nënujore. Rezonanca i referohet dridhjeve të mëdha që ndodhin kur aplikoni një forcë në frekuencën ideale, si shtyrja e një fëmije në një ritëm. Kjo i lejon robotit të përdorë shumë pak energji por të gjenerojë avionë të mëdhenj uji për të shtyrë veten përpara.
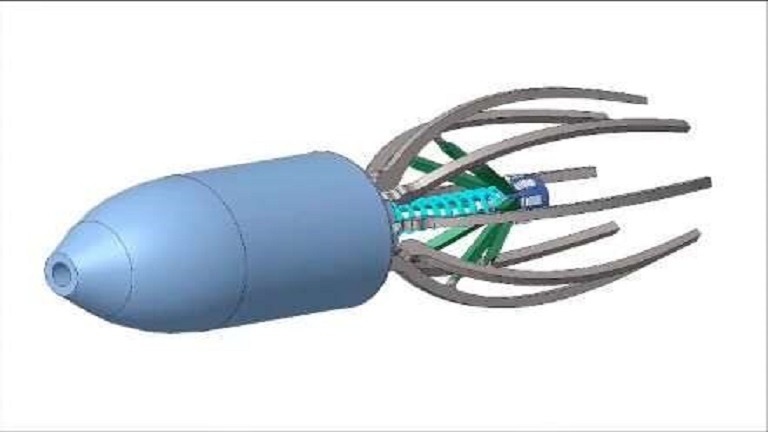
Mekanizmi i thjeshtë por efektiv përbëhet nga membrana gome që mbyll tetë brinjë fleksibël të shtypura 3-D, të cilat së bashku formojnë një ‘zile shtytëse’. Një piston i vogël në gjysmën e sipërme të robotit godet këtë zile në mënyrë të përsëritur në mënyrë që të zgjerohet dhe më pas të kthehet prapa. Kjo imiton teknikën e notit të një kandili deti dhe prodhoi avionë lëngu për të çuar robotin nëpër ujë. Kur pistoni operon me frekuencën e duhur – rezonanca natyrore për përbërësit – roboti mund të lëvizë me një gjatësi të trupit për sekondë dhe të përputhet me efikasitetin e kandilit të detit Aurella aurita.
Testet e fundit tregojnë se roboti i ri është dhjetë deri në pesëdhjetë herë më efikas sesa automjetet e vogla tipike nënujore që mundësohen nga helika. Kjo efikasitet i rritur, i kombinuar me përfitimet shtesë të jashtme të butë, fleksibël të robotit do ta bëjë atë ideal për të operuar pranë mjediseve të ndjeshme si një gumë koralore, zona arkeologjike, apo edhe në ujërat e mbushura me notarë.
Bashkë-autori Thierry Bujard, një student Master në Arkitekturën Detare në Universitetin e Southampton, projektoi dhe ndërtoi robotin për disa muaj. Thierry tha, “Përpjekjet e mëparshme për të shtyrë robotët nënujorë me sisteme avioni kanë përfshirë shtytjen e ujit përmes një tubi të ngurtë, por ne donim ta çonim atë më tej, kështu që sollëm elasticitetin dhe rezonancën për të imituar biologjinë. Unë u befasova me të vërtetë nga rezultatet, isha i sigurt se dizajni do të funksiononte, por efikasiteti i robotit ishte shumë më i madh nga sa prisja “.
Dr. Gabriel Weymouth, Profesor i Asociuar në Shkollën e Inxhinierisë të Universitetit, i cili mbikëqyri projektin shtoi, “Gjëja më e mirë për përdorimin e rezonancës është se ne mund të arrijmë dridhje të mëdha të ziles propulsive me një sasi shumë të vogël të energjisë; ne vetëm duhet të nxirrni atë jashtë formës dhe lërini elasticitetin dhe inercinë të bëjnë pjesën tjetër.Kjo na ka lejuar të zhbllokojmë efikasitetin e shtytjes së përdorur nga krijesat e detit që përdorin avionë për të notuar.
“Dekada e fundit ka parë një rritje të kërkimit në lidhje me robotët fleksibël dhe të frymëzuar nga biologjikisht, siç është” Big Dog “i Boston Dynamic, sepse ata mund të jenë shumë më të zhdërvjellët se sa robotët e industrisë standarde. Ky hulumtim tregon se këto koncepte mund të zbatohen gjithashtu për robotikë nënujore.
“Ka ende shumë sfida dhe mundësi emocionuese për të eksploruar me teknologji robotike nënujore. Tani po kërkojmë të shtrijmë konceptin prapa këtij roboti në një automjet nënujor plotësisht të manovrueshëm dhe autonom të aftë të ndiejë dhe të lundrojë në mjedisin e tij.”